搜索查詢
EL-IBrobot人形機器人組成原理(lǐ)實驗系統
系統功能(néng)概述
|
EL-IBrobot型教學(xué)實驗系統是屬于一種機器人原理(lǐ)教學(xué)實驗系統,它包括嵌入式CPU、功率驅動、舵機控制、機器人傳感與通信、頭部控制、機器人手臂、機器人腿部控制等幾部分(fēn),該平台支持EXP-89S51、EXP-STM32F107、EXP-STM32F407等CPU闆,實現了多(duō)模塊的應用(yòng)實驗。它是集單片機、機器人用(yòng)舵機、常用(yòng)傳感器的學(xué)習、應用(yòng)編程、開發研究于一體(tǐ)的多(duō)功能(néng)創新(xīn)平台。實驗箱上除了可(kě)以用(yòng)來學(xué)習單片機基礎入門操作(zuò)外,還可(kě)以用(yòng)來學(xué)習PWM标準舵機和串行總線(xiàn)舵機的控制協議以及各種常見傳感器的使用(yòng)。試驗箱有(yǒu)搭配了MPU6050六軸運動傳感器的5個自由度機器人機械手舵機雲台、搭配有(yǒu)兩個HY-SRF05超聲波測距模塊的8個自由度機器人機械腿行走避障舵機雲台、搭配了Pixy CMUcam5 圖像識别傳感器的2個自由度機器人視覺追蹤舵機雲台以及兩個用(yòng)于對串行總線(xiàn)舵機和PWM标準舵機的單舵機訓練雲台等五個雲台,以及拓展了LCD12864液晶顯示模塊、1838紅外接收和HC-05藍牙遙控模塊,可(kě)以完成基于CPU硬件資源的基礎性實驗、基于兩種舵機的人形機器人肢體(tǐ)控制實驗以及外拓傳感器實驗等等。 |
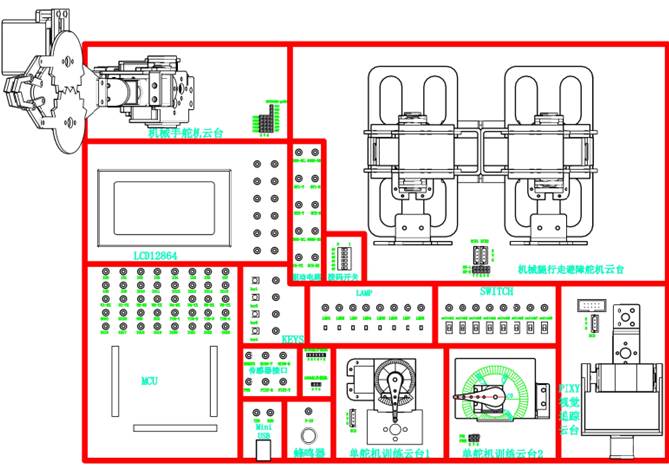
EL-IBrobot平面效果圖 |
硬件資源
實驗箱硬件資源:
CPU:支持EXP-89S51、EXP-STM32F107、EXP-STM32F407;
傳感器部分(fēn):
(1)、1838紅外接收模塊,NEC編碼遙控器
(2)、HC-05彙承藍牙模塊,基于 Bluetooth Specification V2.0 帶 EDR 藍牙協議,工(gōng)作(zuò)頻段為(wèi) 2.4GHz ISM,調制方式是 GFSK。模塊最大發射功率為(wèi) 4dBm,接收靈敏度-85dBm,闆載 PCB 天線(xiàn),可(kě)以實現 10 米距離通信。
(3)、Pixy CMUcam5視覺追蹤模塊,傳輸速率1Mbits/s,即每秒(miǎo)可(kě)以發送超過6000個識别的物(wù)體(tǐ)或每幀135個被識别的物(wù)體(tǐ)(Pixy每秒(miǎo)可(kě)以處理(lǐ)50幀畫面),支持SPI,I2C,UART或模拟/數字 I/O口(通過10Pin接口)、USB2.0等通信方式。
(4)、MPU6050六軸運動傳感器,是 InvenSense 公(gōng)司推出的全球首款整合性 6 軸運動處理(lǐ)組件,可(kě)實時測量3軸陀螺儀和3軸加速度傳感器以及溫度傳感器;
(5)、HY-SRF05 超聲波測距模塊,2cm-450cm 的非接觸式距離感測功能(néng), 測距精(jīng)度可(kě)達高到3mm。
機器人舵機控制訓練部分(fēn)
|
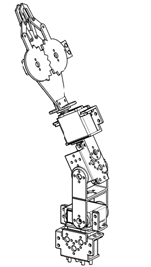
(1)、 機器人單臂舵機雲台
|
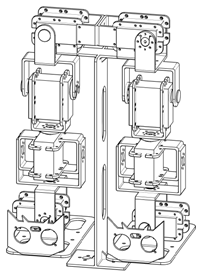
(2)、 機器人雙腿行走舵機雲台
|
(3)、 PIXY機器人視覺追蹤舵機雲台 |
|
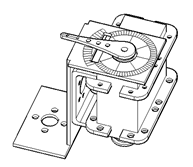
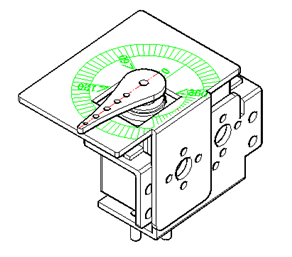
(4)、 單舵機訓練雲台1
|
(5)、 單舵機訓練雲台2
|
LCD12864液晶顯示模塊;
蜂鳴器模塊:高電(diàn)平工(gōng)作(zuò);
Mini USB接口:主控芯片CH340;
LED燈、開關、按鍵等基礎實驗
該平台可(kě)支持多(duō)種CPU闆卡,并且所有(yǒu)闆卡可(kě)以獨立供電(diàn),單獨使用(yòng),方便進行二次開發、課程設計、畢業設計,參加電(diàn)子競賽。
可(kě)開設的實驗項目
| 機器人控制器基礎實驗 | |||
| 實驗一 GPIO操作(zuò)實驗 | 實驗二 外部中(zhōng)斷實驗 | 實驗三 通用(yòng)定時器實驗 | 實驗四 串口通信實驗 |
| 實驗五 PWM發生器實驗 | 實驗六 LCD12864液晶顯示實驗 | ||
| 機器人肢體(tǐ)動作(zuò)控制實驗 | |||
| 實驗一 舵機PWM控制實驗 | 實驗二 PCA9685驅動實驗 | 實驗三 串行總線(xiàn)舵機驅動實驗 | 實驗四 機器人單臂動作(zuò)控制實驗 |
| 實驗五 機器人雙腿動作(zuò)控制實驗 | 實驗六 機器人頭部視覺追蹤實驗 | ||
| 機器人用(yòng)傳感器實驗 | |||
| 實驗一 1838紅外遙控實驗 | 實驗二 超聲波測距實驗 | 實驗三 六軸運動傳感器實驗 | 實驗四 PIXY2視覺識别實驗 |
| 實驗五 藍牙透傳實驗 | |||
| 機器人用(yòng)舵機雲台實驗實驗 | |||
| 實驗一 機器人紅外遙控實驗 | 實驗二 機器人行走避障實驗 | 實驗三 機器人身體(tǐ)平衡自調節實驗 | 實驗四 機器人目标追蹤實驗 |
| 實驗五 機器人藍牙遙控實驗 | |||
| 綜合實驗 | |||
| 實驗一 視覺追蹤人形機器人(PWM标準舵機) | 實驗二 視覺追蹤人形機器人(串行總線(xiàn)舵機) | ||
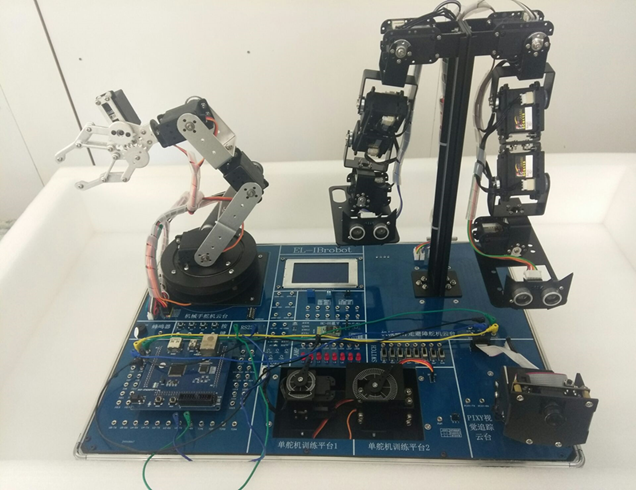
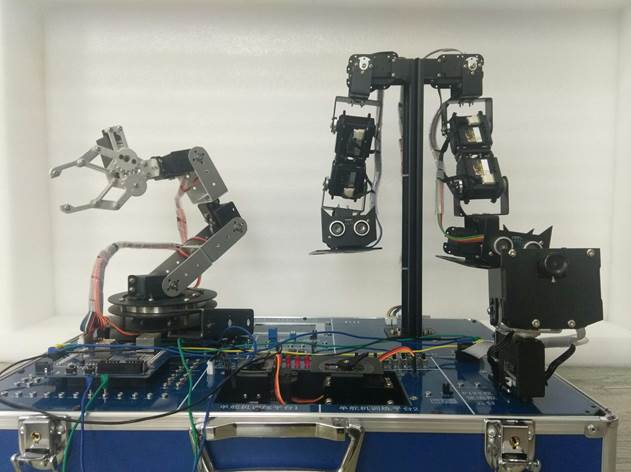
機器人實物(wù)圖
-
-

-
關于光啓
聯系或咨詢我們
咨詢熱線(xiàn):
手機:
深圳市龍崗區(qū)龍城街(jiē)道黃閣社區(qū)京基禦景時代大廈南區(qū)904A
掃碼關注
Copyright © 2021 深圳市光啓教育科(kē)技(jì )有(yǒu)限公(gōng)司 版權所有(yǒu) | 京ICP證000000号 SEO标簽
Copyright © 2021 深圳市光啓教育科(kē)技(jì )有(yǒu)限公(gōng)司 版權所有(yǒu)
京ICP證000000号 網站建設:中(zhōng)企動力 深圳