搜索查詢
EL-SMCK伺服電(diàn)機控制實驗開發套件
适用(yòng)範圍
SMCK伺服電(diàn)機控制實驗箱以下簡稱SMCK實驗箱,是針對工(gōng)科(kē)高校本科(kē)電(diàn)氣信息類、控制類、電(diàn)氣工(gōng)程及其自動化專業以及自動化專業的實驗教學(xué)而設計的一個産(chǎn)品,适合于DSP應用(yòng)于電(diàn)機數字控制的實驗和技(jì )術研究,支持2812和28335CPU。
結構簡介及特點
|
采用(yòng)實驗箱及電(diàn)路闆結構,能(néng)實現三種電(diàn)機的控制,包括直流有(yǒu)刷永磁電(diàn)動機(帶減速器),直流無刷電(diàn)動機(帶減速器)和三相步進電(diàn)機。也可(kě)以單獨控制一種電(diàn)機,成本更低。
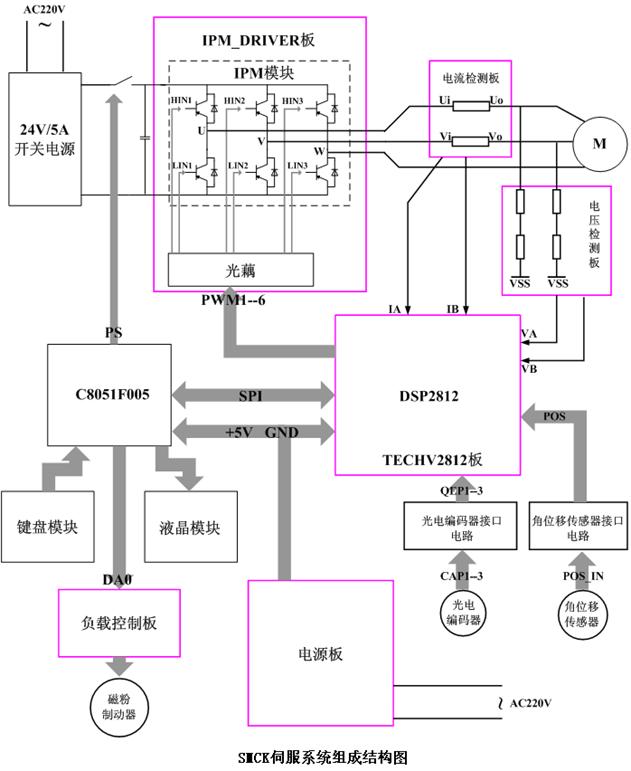
1、産(chǎn)品結構及特點(參考SMCK伺服系統組成結構圖) ⑴ 實驗箱總體(tǐ)上采取在一塊主電(diàn)路闆上插接其他(tā)小(xiǎo)功能(néng)電(diàn)路闆的組成形式,主電(diàn)路主要完成信号的鏈接,人機接口,及PWM信号,CAP信号,電(diàn)壓電(diàn)流反饋信号測量的功能(néng)。 ⑵ 核心控制部件是DSP的CPU闆,直接插接到SMCK實驗箱上,控制功率部件,接受反饋信号,及與主電(diàn)路闆上的單片機通信。其輸出的PWM信号及接收的速度脈沖信号已引到主電(diàn)路闆上,可(kě)以很(hěn)方便的測量。目前有(yǒu)TMS320C2812一種CPU控制闆。 ⑶ 功率部分(fēn)是IPM_DRIVER功率轉換闆,直接插接到SMCK實驗箱上,功率器件采用(yòng)國(guó)際整流器IR公(gōng)司的IPM模塊IRAMS10UP60B-2,闆上通過光藕器件與DSP隔離,還附帶測試孔,能(néng)方便測試光藕後的PWM波形。 ⑷ 電(diàn)流電(diàn)壓信号檢測部分(fēn)是SMCK_AS信号檢測闆,直接插接到SMCK實驗箱上,能(néng)實時監測功率模塊輸出的電(diàn)流及電(diàn)壓信号,并将其轉換為(wèi)弱電(diàn)信号,反饋回主電(diàn)路闆及DSP,客戶可(kě)以在主電(diàn)路闆上方便的測量反饋信号,也可(kě)以利用(yòng)其反饋信号開發DSP控制算法。 ⑸ 人機接口部分(fēn)位于主電(diàn)路闆上,由顯示屏、觸摸按鍵及給定電(diàn)位器組成。顯示屏采用(yòng)320*240點陣、5.2寸單色液晶,操作(zuò)界面更友好,觀察信息更方便,并可(kě)以完成速度信号動态曲線(xiàn)描繪,使系統性能(néng)表現的更直觀。給定電(diàn)位器能(néng)完成電(diàn)機的連續跟蹤的給定任務(wù)。人機接口和磁粉制動器以及其他(tā)輔助控制功能(néng)由主電(diàn)路闆上的一個單片機進行控制,不占用(yòng)DSP的處理(lǐ)時間。 ⑹ 電(diàn)源部分(fēn)在實驗箱内部,控制電(diàn)源與功率電(diàn)源分(fēn)别供電(diàn),功率電(diàn)源采用(yòng)一個24V/5A的開關電(diàn)源,滿足電(diàn)機功率要求,24V電(diàn)源幹擾少,有(yǒu)短路自保護,可(kě)靠且安(ān)全。 ⑺ 控制對象包括24V直流伺服電(diàn)機(加減速器)、步進電(diàn)機、磁粉制動器、光電(diàn)編碼器、角位移傳感器,它們都是通過電(diàn)纜與實驗箱主電(diàn)路闆連接的。不同的電(diàn)機機組組成形式有(yǒu)所不同。直流有(yǒu)刷永磁電(diàn)動機采用(yòng)歐姆龍公(gōng)司的1000線(xiàn)增量式旋轉光電(diàn)編碼器,直流無刷電(diàn)機采用(yòng)電(diàn)機内部的霍爾信号傳感器,三相步進電(diàn)機不接測速裝(zhuāng)置。見右側的機組示意圖。 |
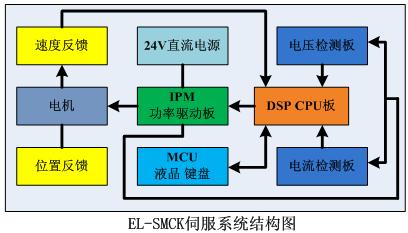 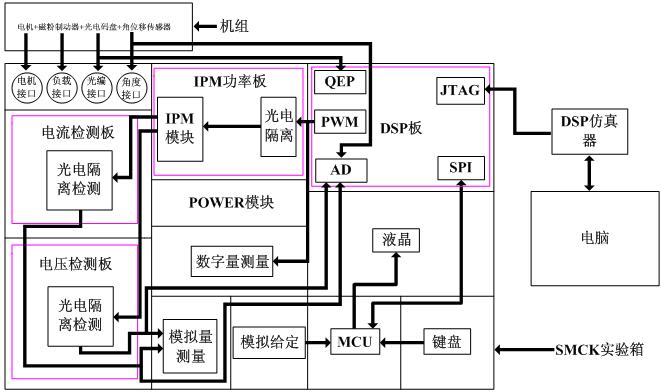
EL-SMCK實驗箱系統硬件框圖
|
實驗項目
| 2812CPU闆能(néng)進行的脫機實驗 | ||
| 實驗一 直流有(yǒu)刷永磁電(diàn)動機速度閉環控制實驗 | 實驗二 直流有(yǒu)刷永磁電(diàn)動機位置閉環控制實驗 | 實驗三 直流無刷電(diàn)動機速度閉環控制實驗 |
|
1、可(kě)通過按鍵輸入速度設定值,觀察電(diàn)機速度的穩定性。 2、可(kě)通過按鍵輸入負載設定值,觀察電(diàn)機的抗幹擾性能(néng)。 3、可(kě)通過示波器測量主電(diàn)路闆上的測試點,測量包括PWM信号、CAP信号、電(diàn)流檢測信号,電(diàn)壓檢測信号在内的波形,對PWM控制原理(lǐ)及電(diàn)機運行原理(lǐ)有(yǒu)直觀的認識。 4、可(kě)通過液晶顯示屏中(zhōng)的速度動态曲線(xiàn)描繪模塊,觀察控制系統的動态特性。 |
1、可(kě)通過按鍵輸入位置設定值,觀察電(diàn)機位置控制的穩态精(jīng)度及跟随的快速性。 2、可(kě)通過給定電(diàn)位器連續輸入位置設定值,觀察電(diàn)機位置控制的連續跟蹤性能(néng)。 3、可(kě)通過按鍵輸入負載設定值,觀察電(diàn)機随動過程中(zhōng)的抗幹擾性能(néng)。 4、可(kě)通過液晶顯示屏中(zhōng)的速度動态曲線(xiàn)描繪模塊,觀察電(diàn)機随動過程中(zhōng)的速度曲線(xiàn)變化。 |
1、可(kě)通過按鍵輸入速度設定值,觀察電(diàn)機速度的穩定性。 2、可(kě)通過按鍵輸入負載設定值,觀察電(diàn)機的抗幹擾性能(néng)。 3、可(kě)通過示波器測量主電(diàn)路闆上的測試點,測量包括PWM信号、CAP信号、電(diàn)流檢測信号,電(diàn)壓檢測信号在内的波形,對PWM控制原理(lǐ)及電(diàn)機運行原理(lǐ)有(yǒu)直觀的認識。 4、可(kě)通過液晶顯示屏中(zhōng)的速度動态曲線(xiàn)描繪模塊,觀察控制系統的動态特性。 |
| 實驗四 直流無刷電(diàn)動機位置閉環控制實驗 | 實驗五 三相步進電(diàn)動機位置閉環控制實驗 | |
|
1、可(kě)通過按鍵輸入位置設定值,觀察電(diàn)機位置控制的穩态精(jīng)度及跟随的快速性。 2、可(kě)通過按鍵輸入負載設定值,觀察電(diàn)機随動過程中(zhōng)的抗幹擾性能(néng)。 3、可(kě)通過液晶顯示屏中(zhōng)的速度動态曲線(xiàn)描繪模塊,觀察電(diàn)機随動過程中(zhōng)的速度曲線(xiàn)變化。 |
1、可(kě)通過按鍵輸入位置設定值,觀察電(diàn)機位置控制的穩态精(jīng)度及跟随的快速性。 2、可(kě)通過按鍵輸入負載設定值,觀察電(diàn)機随動過程中(zhōng)的抗幹擾性能(néng)。 3、可(kě)通過示波器測量主電(diàn)路闆上的測試點,測量包括PWM信号、電(diàn)流檢測信号,電(diàn)壓檢測信号在内的波形,對步進電(diàn)機控制原理(lǐ)及電(diàn)機運行原理(lǐ)有(yǒu)直觀的認識。 |
|
| 2812CPU闆能(néng)進行的仿真實驗: | ||
| 實驗一 直流有(yǒu)刷永磁電(diàn)動機控制方案 | 實驗二 直流無刷電(diàn)動機PWM控制方案 | |
|
步驟1 轉矩控制實驗 步驟2 速度閉環PID控制實驗 步驟3 位置、速度雙閉環控制實驗 |
步驟1 開環尋找最佳換相表及轉矩控制實驗 步驟2 速度閉環PID控制實驗 步驟3 位置、速度雙閉環控制實驗 |
|
|
實驗三 三相步進電(diàn)機DSP控制方案
|
實驗四 三相步進電(diàn)動機位置閉環控制實驗
|
|
産(chǎn)品實物(wù)圖

EL-SMCK實驗箱
|
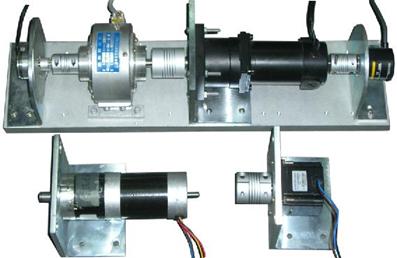
機組套件 |
-
-

-
關于光啓
聯系或咨詢我們
咨詢熱線(xiàn):
手機:
深圳市龍崗區(qū)龍城街(jiē)道黃閣社區(qū)京基禦景時代大廈南區(qū)904A
掃碼關注
Copyright © 2021 深圳市光啓教育科(kē)技(jì )有(yǒu)限公(gōng)司 版權所有(yǒu) | 京ICP證000000号 SEO标簽
Copyright © 2021 深圳市光啓教育科(kē)技(jì )有(yǒu)限公(gōng)司 版權所有(yǒu)
京ICP證000000号 網站建設:中(zhōng)企動力 深圳